File:NASA-Mars2020Rover-ArmTesting-TimeLapse-20190726.webm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fitxer original (Fitxer d'àudio/vídeo WebM, VP8/Opus, durada 20 s, 1.920 × 1.080 píxels, 1,88 Mbps total)
Llegendes
Llegendes
Resum[modifica]
| Descripció |
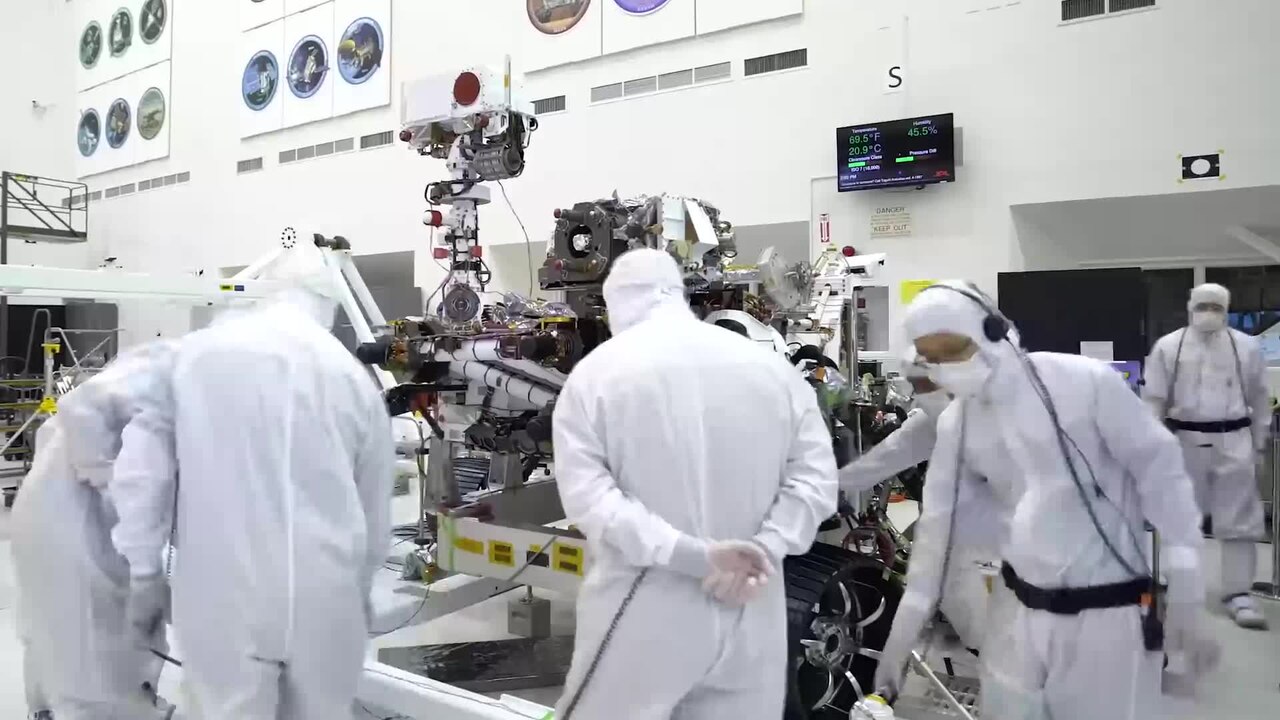
English: NASA's Mars 2020 Rover Does Biceps Curls
Clean room of the Spacecraft Assembly Facility at JPL In this image, taken July 19, 2019, in the clean room of the Spacecraft Assembly Facility at JPL, the rover's 7-foot-long (2.1-meter-long) arm maneuvers its 88-pound (40-kilogram) sensor-laden turret as it moves from a deployed to a stowed configuration. Credit: NASA/JPL-Caltech The robotic arm on NASA's Mars 2020 rover does not have deltoids, triceps or biceps, but it can still curl heavy weights with the best. In this time-lapse video, taken July 19, 2019, in the clean room of the Spacecraft Assembly Facility at the Jet Propulsion Laboratory in Pasadena, California, the rover's 7-foot-long (2.1-meter-long) arm handily maneuvers 88 pounds' (40 kilograms') worth of sensor-laden turret as it moves from a deployed to a stowed configuration. In this time-lapse video, taken July 19, 2019, in the clean room of the Spacecraft Assembly Facility at JPL, the rover's 7-foot-long (2.1-meter-long) arm maneuvers its 88-pound (40-kilogram) sensor-laden turret as it moves from a deployed to a stowed configuration. Credit: NASA/JPL-Caltech The rover's arm includes five electrical motors and five joints (known as the shoulder azimuth joint, shoulder elevation joint, elbow joint, wrist joint and turret joint). The rover's turret includes HD cameras, the Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals (SHERLOC) science instrument, the Planetary Instrument for X-ray Lithochemistry (PIXL), and a percussive drill and coring mechanism. On Mars, the arm and turret will work together, allowing the rover to work as a human geologist would: by reaching out to interesting geologic features, abrading, analyzing and even collecting them for further study via Mars 2020's Sample Caching System, which will collect samples of Martian rock and soil that will be returned to Earth by a future mission. "This was our first opportunity to watch the arm and turret move in concert with each other, making sure that everything worked as advertised - nothing blocking or otherwise hindering smooth operation of the system," said Dave Levine, integration engineer for Mars 2020. "Standing there, watching the arm and turret go through their motions, you can't help but marvel that the rover will be in space in less than a year from now and performing these exact movements on Mars in less than two." Mars 2020 will launch from Cape Canaveral Air Force Station in Florida in July 2020. It will land at Jezero Crater on Feb. 18, 2021. |
| Data | Taken on 19 de juliol de 2019 |
| Font | https://www.youtube.com/watch?v=aT9kxH894lo; see also https://www.jpl.nasa.gov/news/news.php?feature=7464 |
| Autor | NASA/JPL-Caltech |
Llicència[modifica]
| Aquest fitxer és en el domini públic perquè ha estat creat per la NASA. L'avís legal de la NASA diu que «el material de la NASA no està protegit per copyright si no es diu el contrari». (NASA copyright policy page o JPL Image Use Policy). | ||
 |
Atenció:
|
Historial del fitxer
Cliqueu una data/hora per veure el fitxer tal com era aleshores.
| Data/hora | Miniatura | Dimensions | Usuari/a | Comentari | |
|---|---|---|---|---|---|
| actual | 21:59, 26 jul 2019 | 20 s, 1.920 × 1.080 (4,51 Mo) | Drbogdan (discussió | contribucions) | User created page with UploadWizard |
No podeu sobreescriure aquest fitxer.
Ús del fitxer
Les 2 pàgines següents utilitzen aquest fitxer:
Transcode status
Update transcode statusÚs global del fitxer
Utilització d'aquest fitxer en altres wikis:
- Utilització a ca.wikipedia.org
- Utilització a es.wikipedia.org
- Utilització a pt.wikipedia.org