Category:Control theory
Zur Navigation springen
Zur Suche springen
Regelungstheorie komplexer dynamischer Syteme | |||||
| Medium hochladen | |||||
| Ist ein(e) | |||||
|---|---|---|---|---|---|
| Unterklasse von |
| ||||
| Ist Teil von |
| ||||
| Nachfolger | |||||
| |||||
Unterkategorien
Es werden 32 von insgesamt 32 Unterkategorien in dieser Kategorie angezeigt:
In Klammern die Anzahl der enthaltenen Kategorien (K), Seiten (S), Dateien (D)
*
A
- Adaptive systems (18 D)
B
- Control theory block diagrams (293 D)
C
D
E
F
- Control–feedback–abort loop (12 D)
- Force control (7 D)
H
I
K
- Kalman filters (13 D)
M
N
O
- Obstacle avoidance (4 D)
P
- PID controllers (66 D)
R
S
- SVG control theory (112 D)
T
- Transfer functions (7 D)
V
Seiten in der Kategorie „Control theory“
Folgende 2 Seiten sind in dieser Kategorie, von 2 insgesamt.
Medien in der Kategorie „Control theory“
Folgende 200 Dateien sind in dieser Kategorie, von 304 insgesamt.
(vorherige Seite) (nächste Seite)-
 4-Auge.jpg 2.176 × 1.664; 818 KB
4-Auge.jpg 2.176 × 1.664; 818 KB
-
 Add mul uncert.gif 695 × 620; 8 KB
Add mul uncert.gif 695 × 620; 8 KB
-
 Aizerman 2d 1.png 653 × 653; 11 KB
Aizerman 2d 1.png 653 × 653; 11 KB
-
 Aizerman 2d.png 653 × 653; 12 KB
Aizerman 2d.png 653 × 653; 12 KB
-
 Aizerman ce-Wirkung.png 653 × 653; 10 KB
Aizerman ce-Wirkung.png 653 × 653; 10 KB
-
 Aizerman d wirkung.png 653 × 653; 11 KB
Aizerman d wirkung.png 653 × 653; 11 KB
-
 Aizerman lernen.gif 480 × 480; 143 KB
Aizerman lernen.gif 480 × 480; 143 KB
-
 Aizerman2d 1.png 1.328 × 1.448; 248 KB
Aizerman2d 1.png 1.328 × 1.448; 248 KB
-
 Aizerman2d.jpg 591 × 569; 74 KB
Aizerman2d.jpg 591 × 569; 74 KB
-
 Aizerman3.gif 480 × 480; 184 KB
Aizerman3.gif 480 × 480; 184 KB
-
 Aizermann00.png 839 × 839; 7 KB
Aizermann00.png 839 × 839; 7 KB
-
 Aizermann001.png 839 × 839; 10 KB
Aizermann001.png 839 × 839; 10 KB
-
 Alpha beta filter 0.5-0.1.jpg 1.181 × 585; 231 KB
Alpha beta filter 0.5-0.1.jpg 1.181 × 585; 231 KB
-
 Alpha beta filter 0.85-0.005.jpg 1.131 × 588; 234 KB
Alpha beta filter 0.85-0.005.jpg 1.131 × 588; 234 KB
-
 Alpha beta filter 1.5-.5.jpg 1.215 × 603; 226 KB
Alpha beta filter 1.5-.5.jpg 1.215 × 603; 226 KB
-
 Amortiguacion.png 560 × 420; 6 KB
Amortiguacion.png 560 × 420; 6 KB
-
 Amplitudengänge des geschlossenen Regelkreises beim Führungsverhalten.png 3.508 × 2.481; 228 KB
Amplitudengänge des geschlossenen Regelkreises beim Führungsverhalten.png 3.508 × 2.481; 228 KB
-
 Analogue anticipatory or attenuating compensation network.png 254 × 202; 1 KB
Analogue anticipatory or attenuating compensation network.png 254 × 202; 1 KB
-
 Analogue integral-derivative compensation network.png 298 × 202; 1 KB
Analogue integral-derivative compensation network.png 298 × 202; 1 KB
-
 An information-centric approach to autonomous trajectory planning utilizing optimal control techniques (IA aninformationcen1094510469).pdf 1.275 × 1.650, 298 Seiten; 6,94 MB
An information-centric approach to autonomous trajectory planning utilizing optimal control techniques (IA aninformationcen1094510469).pdf 1.275 × 1.650, 298 Seiten; 6,94 MB
-
 Approximation eines pt1-gliedes mit diskretisierter zeit euler-rückwärts.png 900 × 1.065; 232 KB
Approximation eines pt1-gliedes mit diskretisierter zeit euler-rückwärts.png 900 × 1.065; 232 KB
-
 Arrivalangles.png 1.166 × 824; 34 KB
Arrivalangles.png 1.166 × 824; 34 KB
-
 Ausschnitt original modellregelstrecke.png 789 × 1.090; 215 KB
Ausschnitt original modellregelstrecke.png 789 × 1.090; 215 KB
-
 Bandwidth2 zh.png 499 × 310; 8 KB
Bandwidth2 zh.png 499 × 310; 8 KB
-
 Bassin De Capture Du Noyau de Viabilité.png 599 × 662; 23 KB
Bassin De Capture Du Noyau de Viabilité.png 599 × 662; 23 KB
-
 Betragsoptimum im Vergleich - Führungsübergangsfunktion.png 840 × 630; 30 KB
Betragsoptimum im Vergleich - Führungsübergangsfunktion.png 840 × 630; 30 KB
-
 Betragsoptimum im Vergleich - Störungsübergangsfunktion.png 840 × 630; 34 KB
Betragsoptimum im Vergleich - Störungsübergangsfunktion.png 840 × 630; 34 KB
-
 Bewegung schwingungsglied im zustandsraum.png 656 × 781; 129 KB
Bewegung schwingungsglied im zustandsraum.png 656 × 781; 129 KB
-
 Biascurves01.jpeg 689 × 689; 191 KB
Biascurves01.jpeg 689 × 689; 191 KB
-
 Bibo-stabilität für verschiedene übertragungssysteme.png 972 × 891; 207 KB
Bibo-stabilität für verschiedene übertragungssysteme.png 972 × 891; 207 KB
-
 Bicycle and motorcycle dynamics Stability 1C.png 345 × 359; 17 KB
Bicycle and motorcycle dynamics Stability 1C.png 345 × 359; 17 KB
-
 Bicycle and motorcycle dynamics Stability 1C.svg 431 × 449; 49 KB
Bicycle and motorcycle dynamics Stability 1C.svg 431 × 449; 49 KB
-
 Bicycle and motorcycle dynamics Stability 2C.png 343 × 343; 17 KB
Bicycle and motorcycle dynamics Stability 2C.png 343 × 343; 17 KB
-
 Bicycle and motorcycle dynamics Stability 3C.png 343 × 343; 19 KB
Bicycle and motorcycle dynamics Stability 3C.png 343 × 343; 19 KB
-
 Bicycle dimensions.svg 563 × 351; 21 KB
Bicycle dimensions.svg 563 × 351; 21 KB
-
 Bike dimensions.svg 563 × 351; 13 KB
Bike dimensions.svg 563 × 351; 13 KB
-
 BikeModel.jpg 276 × 320; 15 KB
BikeModel.jpg 276 × 320; 15 KB
-
 BMIresiduals.png 386 × 272; 3 KB
BMIresiduals.png 386 × 272; 3 KB
-
 Bodelag.png 1.112 × 724; 35 KB
Bodelag.png 1.112 × 724; 35 KB
-
 Bodelead.png 1.112 × 724; 30 KB
Bodelead.png 1.112 × 724; 30 KB
-
 Boucle.jpg 762 × 663; 62 KB
Boucle.jpg 762 × 663; 62 KB
-
 Cambell filter.png 724 × 178; 8 KB
Cambell filter.png 724 × 178; 8 KB
-
 Cart-pendulum.png 616 × 487; 12 KB
Cart-pendulum.png 616 × 487; 12 KB
-
 Cat fall 150x300 6fps.gif 150 × 298; 393 KB
Cat fall 150x300 6fps.gif 150 × 298; 393 KB
-
 Ccf.png 1.477 × 865; 24 KB
Ccf.png 1.477 × 865; 24 KB
-
 CGKang fig1.jpg 1.656 × 1.166; 94 KB
CGKang fig1.jpg 1.656 × 1.166; 94 KB
-
 CGKang fig2.jpg 1.432 × 714; 63 KB
CGKang fig2.jpg 1.432 × 714; 63 KB
-
 CGKang fig3.jpg 1.325 × 730; 90 KB
CGKang fig3.jpg 1.325 × 730; 90 KB
-
 CGKang fig4.jpg 1.333 × 699; 85 KB
CGKang fig4.jpg 1.333 × 699; 85 KB
-
 CGKang fig5.jpg 1.158 × 682; 43 KB
CGKang fig5.jpg 1.158 × 682; 43 KB
-
 CGKang fig6.jpg 1.847 × 734; 80 KB
CGKang fig6.jpg 1.847 × 734; 80 KB
-
 CGKang fig7.jpg 566 × 588; 27 KB
CGKang fig7.jpg 566 × 588; 27 KB
-
 CGKang fig8.jpg 729 × 796; 65 KB
CGKang fig8.jpg 729 × 796; 65 KB
-
 Change with Kd.png 465 × 368; 7 KB
Change with Kd.png 465 × 368; 7 KB
-
 Change with Ki open loop.png 814 × 583; 18 KB
Change with Ki open loop.png 814 × 583; 18 KB
-
 Change with Ki.png 465 × 367; 8 KB
Change with Ki.png 465 × 367; 8 KB
-
 Change with Kp open loop.png 814 × 583; 18 KB
Change with Kp open loop.png 814 × 583; 18 KB
-
 Change with Kp.png 466 × 366; 4 KB
Change with Kp.png 466 × 366; 4 KB
-
 Classic robust problem.GIF 474 × 433; 5 KB
Classic robust problem.GIF 474 × 433; 5 KB
-
 Closed Control Loop.svg 512 × 147; 60 KB
Closed Control Loop.svg 512 × 147; 60 KB
-
 Closed loop gain.png 472 × 319; 15 KB
Closed loop gain.png 472 × 319; 15 KB
-
 Closed-loop optimal control implementations for space applications (IA closedloopoptima1094551586).pdf 1.275 × 1.650, 210 Seiten; 5,32 MB
Closed-loop optimal control implementations for space applications (IA closedloopoptima1094551586).pdf 1.275 × 1.650, 210 Seiten; 5,32 MB
-
 Coaxial transmission line wih one source and one load.jpg 3.301 × 1.351; 369 KB
Coaxial transmission line wih one source and one load.jpg 3.301 × 1.351; 369 KB
-
 Commande, espace d'état + trajectoire, sorties.gif 1.518 × 470; 5,08 MB
Commande, espace d'état + trajectoire, sorties.gif 1.518 × 470; 5,08 MB
-

-
 Complex-adaptive-system.jpg 2.100 × 1.500; 381 KB
Complex-adaptive-system.jpg 2.100 × 1.500; 381 KB
-
 Control object.jpg 166 × 116; 3 KB
Control object.jpg 166 × 116; 3 KB
-
 Control Strategy.jpeg 527 × 495; 37 KB
Control Strategy.jpeg 527 × 495; 37 KB
-
 Control theory with applications to naval hydrodynamics (1975) (20071512563).jpg 1.976 × 1.364; 230 KB
Control theory with applications to naval hydrodynamics (1975) (20071512563).jpg 1.976 × 1.364; 230 KB
-
 Control theory with applications to naval hydrodynamics (1975) (20504470958).jpg 1.822 × 1.520; 273 KB
Control theory with applications to naval hydrodynamics (1975) (20504470958).jpg 1.822 × 1.520; 273 KB
-
 Controllodiretto.gif 535 × 139; 2 KB
Controllodiretto.gif 535 × 139; 2 KB
-
 Controlloretro.gif 376 × 198; 3 KB
Controlloretro.gif 376 × 198; 3 KB
-
 Convergenza modi naturali LTI TC.png 363 × 306; 4 KB
Convergenza modi naturali LTI TC.png 363 × 306; 4 KB
-
 Convergenza modi naturali LTI TD.png 363 × 307; 5 KB
Convergenza modi naturali LTI TD.png 363 × 307; 5 KB
-
 CorrecteurPIDclassique.jpg 775 × 326; 70 KB
CorrecteurPIDclassique.jpg 775 × 326; 70 KB
-
 D change pid.png 750 × 608; 34 KB
D change pid.png 750 × 608; 34 KB
-
 D-Regler.png 274 × 104; 1 KB
D-Regler.png 274 × 104; 1 KB
-
 DcdcCurrentmode.png 550 × 489; 8 KB
DcdcCurrentmode.png 550 × 489; 8 KB
-
 DcdcHystmode.png 537 × 211; 2 KB
DcdcHystmode.png 537 × 211; 2 KB
-
 DcdcVoltagemode.png 566 × 527; 11 KB
DcdcVoltagemode.png 566 × 527; 11 KB
-
 Deadband01.png 672 × 504; 7 KB
Deadband01.png 672 × 504; 7 KB
-
 DELPHIST.png 398 × 306; 3 KB
DELPHIST.png 398 × 306; 3 KB
-
 Dependence between open-loop and closed-loop function.png 266 × 232; 1 KB
Dependence between open-loop and closed-loop function.png 266 × 232; 1 KB
-
 Diskretes Kontinuierliches Signal neu.gif 547 × 434; 104 KB
Diskretes Kontinuierliches Signal neu.gif 547 × 434; 104 KB
-
 Drawing4b new2.png 697 × 472; 24 KB
Drawing4b new2.png 697 × 472; 24 KB
-
 Dreipunktregler für verzögerte integrale regelstrecke.png 663 × 776; 153 KB
Dreipunktregler für verzögerte integrale regelstrecke.png 663 × 776; 153 KB
-
 Dreipunktregler mit hysterese und totzone.png 759 × 420; 23 KB
Dreipunktregler mit hysterese und totzone.png 759 × 420; 23 KB
-
 Dreitank.jpg 378 × 288; 49 KB
Dreitank.jpg 378 × 288; 49 KB
-
 EchelonUnite.png 275 × 127; 3 KB
EchelonUnite.png 275 × 127; 3 KB
-
 Effect of Pole Location in a Root Locus Plot.PNG 715 × 574; 23 KB
Effect of Pole Location in a Root Locus Plot.PNG 715 × 574; 23 KB
-
 EigenfrequenzDaempfungEinspurmodell.png 561 × 420; 9 KB
EigenfrequenzDaempfungEinspurmodell.png 561 × 420; 9 KB
-
 EigenwerteEinspurmodell.png 561 × 420; 9 KB
EigenwerteEinspurmodell.png 561 × 420; 9 KB
-
 Einfache Kontrollschleife.jpeg 2.450 × 1.488; 319 KB
Einfache Kontrollschleife.jpeg 2.450 × 1.488; 319 KB
-
 Elements of a signal flow graph.png 1.201 × 2.626; 101 KB
Elements of a signal flow graph.png 1.201 × 2.626; 101 KB
-
 Entorno-Organizacion SI.JPG 596 × 374; 41 KB
Entorno-Organizacion SI.JPG 596 × 374; 41 KB
-
 Ersatzfunktion regelstrecke.png 779 × 819; 108 KB
Ersatzfunktion regelstrecke.png 779 × 819; 108 KB
-
 Escalon mod.png 560 × 420; 6 KB
Escalon mod.png 560 × 420; 6 KB
-
 Esempio di sistema ad eventi discreti.png 414 × 296; 5 KB
Esempio di sistema ad eventi discreti.png 414 × 296; 5 KB
-
 Etapes identification.JPG 583 × 581; 31 KB
Etapes identification.JPG 583 × 581; 31 KB
-
 Etat Viable et non-viable.png 340 × 264; 39 KB
Etat Viable et non-viable.png 340 × 264; 39 KB
-
 EVIU comparison.png 543 × 260; 9 KB
EVIU comparison.png 543 × 260; 9 KB
-
 EVIU diagram.png 380 × 460; 16 KB
EVIU diagram.png 380 × 460; 16 KB
-
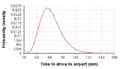 EVIU time to drive to airport.png 417 × 241; 8 KB
EVIU time to drive to airport.png 417 × 241; 8 KB
-
 EVSI diagram.png 541 × 532; 15 KB
EVSI diagram.png 541 × 532; 15 KB
-
 EVSI prior marginals.png 692 × 232; 8 KB
EVSI prior marginals.png 692 × 232; 8 KB
-
 EVSI result.png 669 × 199; 5 KB
EVSI result.png 669 × 199; 5 KB
-
 EVSI trial data.png 688 × 242; 13 KB
EVSI trial data.png 688 × 242; 13 KB
-
 Exemple de noyau d'invariance.png 759 × 792; 29 KB
Exemple de noyau d'invariance.png 759 × 792; 29 KB
-
 Exemplo de resultado obtido com o filtro de kalman.xcf 799 × 599; 96 KB
Exemplo de resultado obtido com o filtro de kalman.xcf 799 × 599; 96 KB
-
 Fault-tolerant control of discrete-event systems with input-output automata.png 3.411 × 1.839; 340 KB
Fault-tolerant control of discrete-event systems with input-output automata.png 3.411 × 1.839; 340 KB
-
 Fig2 a.jpg 560 × 420; 16 KB
Fig2 a.jpg 560 × 420; 16 KB
-
 Fig3a.jpg 560 × 420; 13 KB
Fig3a.jpg 560 × 420; 13 KB
-
 Filtered message threshold.jpg 443 × 111; 49 KB
Filtered message threshold.jpg 443 × 111; 49 KB
-
 Filtered message.jpg 488 × 104; 50 KB
Filtered message.jpg 488 × 104; 50 KB
-
 Firstorder break.png 1.419 × 829; 28 KB
Firstorder break.png 1.419 × 829; 28 KB
-
 Forming a Global System Operation Model.jpg 2.456 × 2.900; 894 KB
Forming a Global System Operation Model.jpg 2.456 × 2.900; 894 KB
-
 Galerkin optimal control (IA galerkinoptimalc1094544526).pdf 1.275 × 1.650, 218 Seiten; 2,68 MB
Galerkin optimal control (IA galerkinoptimalc1094544526).pdf 1.275 × 1.650, 218 Seiten; 2,68 MB
-
 Graf7 02.png 184 × 180; 1 KB
Graf7 02.png 184 × 180; 1 KB
-
 Grafik dreipunktregler mit hysterese und totzone.pdf 1.239 × 1.752; 170 KB
Grafik dreipunktregler mit hysterese und totzone.pdf 1.239 × 1.752; 170 KB
-
 Grafik dreipunktregler mit hysterese und totzone.png 2.067 × 2.583; 308 KB
Grafik dreipunktregler mit hysterese und totzone.png 2.067 × 2.583; 308 KB
-
 Greysteeringengine.png 571 × 741; 111 KB
Greysteeringengine.png 571 × 741; 111 KB
-
 GvEG.png 443 × 292; 21 KB
GvEG.png 443 × 292; 21 KB
-
 Homogene und partikuläre lösung einer dgl.png 669 × 712; 81 KB
Homogene und partikuläre lösung einer dgl.png 669 × 712; 81 KB
-
 Hydraulický posilovač řízení.png 745 × 1.053; 34 KB
Hydraulický posilovač řízení.png 745 × 1.053; 34 KB
-
 HYPERD.GIF 582 × 326; 7 KB
HYPERD.GIF 582 × 326; 7 KB
-
 I change pid.png 750 × 608; 43 KB
I change pid.png 750 × 608; 43 KB
-
 I-Regler.png 274 × 104; 1 KB
I-Regler.png 274 × 104; 1 KB
-
 Identifikation schwingungsglied.png 871 × 957; 193 KB
Identifikation schwingungsglied.png 871 × 957; 193 KB
-
 Illustration of causal and non-causal filters.png 734 × 662; 78 KB
Illustration of causal and non-causal filters.png 734 × 662; 78 KB
-
 Implementation of optimal controls using conventional control systems (IA implementationof1094549798).pdf 1.275 × 1.650, 100 Seiten; 2,06 MB
Implementation of optimal controls using conventional control systems (IA implementationof1094549798).pdf 1.275 × 1.650, 100 Seiten; 2,06 MB
-
 Improving mid-course flight through an application of real-time optimal control (IA improvingmidcour1094556793).pdf 1.275 × 1.650, 96 Seiten; 2,1 MB
Improving mid-course flight through an application of real-time optimal control (IA improvingmidcour1094556793).pdf 1.275 × 1.650, 96 Seiten; 2,1 MB
-
 Impulsantwort experimentelle modellregelstrecke.png 978 × 1.386; 276 KB
Impulsantwort experimentelle modellregelstrecke.png 978 × 1.386; 276 KB
-
 Inventory-Control-Q-IC da.png 526 × 357; 5 KB
Inventory-Control-Q-IC da.png 526 × 357; 5 KB
-
 ISpace.jpg 454 × 314; 29 KB
ISpace.jpg 454 × 314; 29 KB
-
 Linearisierung nichtlineares system.png 386 × 470; 14 KB
Linearisierung nichtlineares system.png 386 × 470; 14 KB
-
 A MATLAB GUI for a Legendre Pseudospectral algorithm for optimal control problems (IA matlabguiforlege00hall).pdf 1.150 × 1.610, 112 Seiten; 5,49 MB
A MATLAB GUI for a Legendre Pseudospectral algorithm for optimal control problems (IA matlabguiforlege00hall).pdf 1.150 × 1.610, 112 Seiten; 5,49 MB
-
 Meyers b19 s0777.jpg 800 × 1.275; 428 KB
Meyers b19 s0777.jpg 800 × 1.275; 428 KB
-
 Modèl de convoi de deux véhicules.JPG 304 × 162; 12 KB
Modèl de convoi de deux véhicules.JPG 304 × 162; 12 KB
-
 Moving horizon estimation scheme.png 986 × 684; 41 KB
Moving horizon estimation scheme.png 986 × 684; 41 KB
-
 Nichtlineare uebertragungssysteme.png 496 × 560; 15 KB
Nichtlineare uebertragungssysteme.png 496 × 560; 15 KB
-
 Nieaaddress.jpg 793 × 449; 163 KB
Nieaaddress.jpg 793 × 449; 163 KB
-
 NoyaudeViabilitéContrôléEtB.png 762 × 676; 37 KB
NoyaudeViabilitéContrôléEtB.png 762 × 676; 37 KB
-
 Nozzle and flapper open and closed loop.png 1.500 × 1.125; 111 KB
Nozzle and flapper open and closed loop.png 1.500 × 1.125; 111 KB
-
 Ocf.png 1.477 × 864; 27 KB
Ocf.png 1.477 × 864; 27 KB
-
 Open loop gain.png 501 × 343; 24 KB
Open loop gain.png 501 × 343; 24 KB
-
 An optimal control formulation of the Blaschke-Lebesgue theorem (IA optimalcontrolfo00ghan).pdf 1.179 × 1.600, 32 Seiten; 1,14 MB
An optimal control formulation of the Blaschke-Lebesgue theorem (IA optimalcontrolfo00ghan).pdf 1.179 × 1.600, 32 Seiten; 1,14 MB
-
 Optimal control of systems governed by delayed-differential equations. (IA optimalcontrolof00hyde).pdf 1.193 × 1.625, 122 Seiten; 2,13 MB
Optimal control of systems governed by delayed-differential equations. (IA optimalcontrolof00hyde).pdf 1.193 × 1.625, 122 Seiten; 2,13 MB
-
 Optimal control of a two wheeled mobile robot (IA optimalcontrolof1094530933).pdf 1.275 × 1.650, 173 Seiten; 4,13 MB
Optimal control of a two wheeled mobile robot (IA optimalcontrolof1094530933).pdf 1.275 × 1.650, 173 Seiten; 4,13 MB
-
 Optimal control of systems governed by delayed-differential equations (IA optimalcontrolofs00hyde).pdf 1.168 × 1.618, 68 Seiten; 2,3 MB
Optimal control of systems governed by delayed-differential equations (IA optimalcontrolofs00hyde).pdf 1.168 × 1.618, 68 Seiten; 2,3 MB
-

-

-
 Original message.jpg 435 × 72; 36 KB
Original message.jpg 435 × 72; 36 KB
-
 Original und modellregelstrecke.png 789 × 1.090; 222 KB
Original und modellregelstrecke.png 789 × 1.090; 222 KB
-
 Oscillation and Feedback.JPG 527 × 605; 38 KB
Oscillation and Feedback.JPG 527 × 605; 38 KB
-
 Output equation cc.png 1.170 × 402; 10 KB
Output equation cc.png 1.170 × 402; 10 KB
-
 P change pid.png 757 × 608; 35 KB
P change pid.png 757 × 608; 35 KB
-
 P d Sprungantwort.jpg 855 × 311; 23 KB
P d Sprungantwort.jpg 855 × 311; 23 KB
-
 P-Regler.png 274 × 104; 1 KB
P-Regler.png 274 × 104; 1 KB
-
 PACs on io racks.jpg 356 × 317; 132 KB
PACs on io racks.jpg 356 × 317; 132 KB
-
 PD-Regler.png 274 × 104; 1 KB
PD-Regler.png 274 × 104; 1 KB
-
 Perfect Pass Switch.jpg 1.280 × 960; 113 KB
Perfect Pass Switch.jpg 1.280 × 960; 113 KB
-
 PI-Regler.png 274 × 104; 1 KB
PI-Regler.png 274 × 104; 1 KB
-
 PID analysis tool.png 1.782 × 727; 134 KB
PID analysis tool.png 1.782 × 727; 134 KB
-
 PID-Regler.png 274 × 104; 1 KB
PID-Regler.png 274 × 104; 1 KB
-
 Polstellen in der s-ebene.png 835 × 946; 82 KB
Polstellen in der s-ebene.png 835 × 946; 82 KB
-
 Position servo and signal flow graph.png 3.189 × 2.101; 318 KB
Position servo and signal flow graph.png 3.189 × 2.101; 318 KB
-
 Positsioonregul.xcf 1.035 × 816; 174 KB
Positsioonregul.xcf 1.035 × 816; 174 KB
-
 Precautionary principle.png 1.292 × 1.196; 286 KB
Precautionary principle.png 1.292 × 1.196; 286 KB
-
 Precision guidance of a rocket using Pseudospectral optimal control (IA precisionguidanc1094563151).pdf 1.275 × 1.650, 128 Seiten; 3,49 MB
Precision guidance of a rocket using Pseudospectral optimal control (IA precisionguidanc1094563151).pdf 1.275 × 1.650, 128 Seiten; 3,49 MB
-
 Presostato.gif 695 × 672; 19 KB
Presostato.gif 695 × 672; 19 KB
-
 Process fault tolerant schemas.png 703 × 358; 22 KB
Process fault tolerant schemas.png 703 × 358; 22 KB
-
 PT1-Glied mit negativem Realteil der Polstellenlage.png 570 × 563; 102 KB
PT1-Glied mit negativem Realteil der Polstellenlage.png 570 × 563; 102 KB
-
 PT1-Glied mit positivem Realteil der Polstellenlage.png 566 × 554; 102 KB
PT1-Glied mit positivem Realteil der Polstellenlage.png 566 × 554; 102 KB
-
 PT1-Glied mit Realteil 0 der Polstellenlage.png 578 × 540; 103 KB
PT1-Glied mit Realteil 0 der Polstellenlage.png 578 × 540; 103 KB
-
 PT2-Glied mit negativem Realteil der Polpaarlage.png 664 × 629; 140 KB
PT2-Glied mit negativem Realteil der Polpaarlage.png 664 × 629; 140 KB
-
 PT2-Glied mit positivem Realteil der Polpaarlage.png 619 × 615; 139 KB
PT2-Glied mit positivem Realteil der Polpaarlage.png 619 × 615; 139 KB
-
 PT2-Glied mit Realteil 0 der Polpaarlage.png 585 × 569; 141 KB
PT2-Glied mit Realteil 0 der Polpaarlage.png 585 × 569; 141 KB
-
 PT2-Tte-modellapproximation.png 739 × 758; 156 KB
PT2-Tte-modellapproximation.png 739 × 758; 156 KB
-
 PT2-Tte-modellprüfung i-regelkreis.png 614 × 786; 143 KB
PT2-Tte-modellprüfung i-regelkreis.png 614 × 786; 143 KB
-
 PT2-Tte-modellprüfung pid-regelkreis.png 649 × 806; 129 KB
PT2-Tte-modellprüfung pid-regelkreis.png 649 × 806; 129 KB
-
 PWM 3L.gif 640 × 480; 132 KB
PWM 3L.gif 640 × 480; 132 KB
-
 Rampa mod.png 560 × 420; 7 KB
Rampa mod.png 560 × 420; 7 KB
-
 Rampenantwort linearfaktoren im zähler.png 819 × 808; 178 KB
Rampenantwort linearfaktoren im zähler.png 819 × 808; 178 KB
-
 Received message.jpg 445 × 105; 73 KB
Received message.jpg 445 × 105; 73 KB
-
 Reflex2.jpg 518 × 197; 16 KB
Reflex2.jpg 518 × 197; 16 KB
-
 Reflex3.jpg 518 × 193; 15 KB
Reflex3.jpg 518 × 193; 15 KB
-
 Regelaar voorbeeld.png 1.024 × 665; 21 KB
Regelaar voorbeeld.png 1.024 × 665; 21 KB
-

-
 Reglerentwurf für reine totzeitregelstrecken.png 933 × 893; 145 KB
Reglerentwurf für reine totzeitregelstrecken.png 933 × 893; 145 KB
-
 Reglerentwurf mit modellregelstrecke.png 1.000 × 1.260; 270 KB
Reglerentwurf mit modellregelstrecke.png 1.000 × 1.260; 270 KB
-
 Reglerparametrierung chien hrodes.png 948 × 853; 130 KB
Reglerparametrierung chien hrodes.png 948 × 853; 130 KB
-
 Reglerparametrierung ersatzstrecke totzeit.png 906 × 873; 131 KB
Reglerparametrierung ersatzstrecke totzeit.png 906 × 873; 131 KB
-
 Reglerparametrierung pid für reihe-parallel.png 706 × 902; 152 KB
Reglerparametrierung pid für reihe-parallel.png 706 × 902; 152 KB
-
 Reglerparametrierung pole nullstellen komp.png 906 × 873; 125 KB
Reglerparametrierung pole nullstellen komp.png 906 × 873; 125 KB
-
 Regulacja spr wyp przep na wlocie.png 318 × 164; 8 KB
Regulacja spr wyp przep na wlocie.png 318 × 164; 8 KB
-
 Regulacja spr wyp przewod obejsciowy.png 349 × 180; 9 KB
Regulacja spr wyp przewod obejsciowy.png 349 × 180; 9 KB
-
 Regulacja spr wyp reg predkosci obr.png 350 × 221; 13 KB
Regulacja spr wyp reg predkosci obr.png 350 × 221; 13 KB
-
 Regulacja spr wyp sart stop.png 335 × 204; 11 KB
Regulacja spr wyp sart stop.png 335 × 204; 11 KB
-
 Regulacja spr wyp upust cisnienia przep na wlocie.png 349 × 168; 11 KB
Regulacja spr wyp upust cisnienia przep na wlocie.png 349 × 168; 11 KB
-
 Regulacja spr wyp upust cisnienia.png 320 × 178; 8 KB
Regulacja spr wyp upust cisnienia.png 320 × 178; 8 KB




























































_(20071512563).jpg)
_(20504470958).jpg)
































































































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}