File:Mars Sample Return Concept Illustration.jpg

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (4,000 × 2,250 pixels, file size: 10.02 MB, MIME type: image/jpeg)
Captions
Captions
Summary
[edit]{kind=link}
| Description |
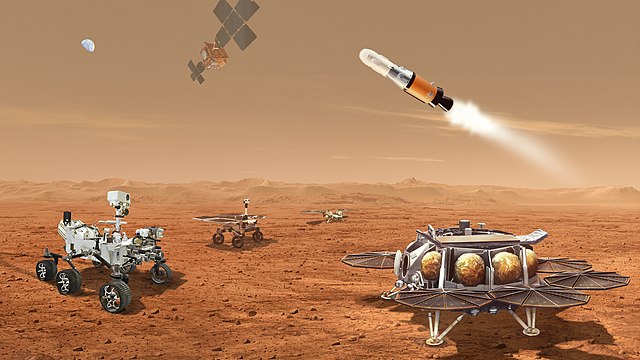
English: April 21, 2022
This illustration shows a concept for multiple robots that would team up to ferry to Earth samples collected from the Mars surface by NASA's Mars Perseverance rover. NASA and ESA (European Space Agency) are developing concepts for the Mars Sample Return program designed to retrieve the samples of Martian rocks and soil being collected and stored in sealed tubes by Perseverance. In the future, the samples would be returned to Earth for detailed laboratory analysis. The current concept envisions delivering a Mars lander near Jezero Crater, where Perseverance (far left) is caching, or collecting, samples. A NASA-provided Sample Retrieval Lander (far right) would carry a NASA rocket (the Mars Ascent Vehicle), and a second lander, pictured in the background, would carry ESA’s Sample Fetch Rover (center), which is a little smaller than a golf cart. The fetch rover would gather the cached samples left on the surface by Perseverance and transport them to the Sample Retrieval Lander, where they would then be transferred onto the Mars Ascent Vehicle. Perseverance could also deliver additional samples directly to the lander. The Mars Ascent Vehicle would launch a container with the samples inside into orbit. Waiting in Mars orbit would be an ESA-provided Earth Return Obiter, which would rendezvous with and capture the orbiting sample container using a NASA-provided Capture, Containment, and Return System. This system would capture and orient the container, then prepare it for return to Earth inside the Earth Entry System. For more information, visit: mars.nasa.gov/msr. Credit NASA/ESA/JPL-Caltech |
| Date | |
| Source |
https://mars.nasa.gov/resources/26278/mars-sample-return-concept-illustration/ https://mars.nasa.gov/resources/26685/mars-sample-retrieval-lander-mars-ascent-vehicle-launch-illustration/ https://mars.nasa.gov/resources/26684/mars-sample-retrieval-lander-concept-illustration/ |
| Author | NASA/ESA/JPL-Caltech |
| Other versions |
{kind=link}
Licensing
[edit]{kind=link}
| This file is in the public domain in the United States because it was solely created by NASA. NASA copyright policy states that "NASA material is not protected by copyright unless noted". (See Template:PD-USGov, NASA copyright policy page or JPL Image Use Policy.) | ||
 |
Warnings:
|
{kind=link}
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 12:59, 14 May 2022 | | 4,000 × 2,250 (10.02 MB) | Chinakpradhan (talk | contribs) | Reverted to version as of 12:57, 14 May 2022 (UTC) why its happening |
| 12:58, 14 May 2022 | 1,044 × 386 (597 KB) | Chinakpradhan (talk | contribs) | Cropped 74 % horizontally, 83 % vertically using CropTool with precise mode. | ||
| 12:57, 14 May 2022 |  | 4,000 × 2,250 (10.02 MB) | Chinakpradhan (talk | contribs) | Reverted to version as of 04:38, 12 May 2022 (UTC) | |
| 12:55, 14 May 2022 | 1,096 × 375 (598 KB) | Chinakpradhan (talk | contribs) | Cropped 73 % horizontally, 83 % vertically using CropTool with precise mode. | ||
| 04:38, 12 May 2022 |  | 4,000 × 2,250 (10.02 MB) | Chinakpradhan (talk | contribs) | better image | |
| 04:30, 12 May 2022 |  | 1,600 × 900 (267 KB) | Chinakpradhan (talk | contribs) | Uploaded a work by NASA/ESA/JPL-Caltech from https://mars.nasa.gov/resources/26278/mars-sample-return-concept-illustration/ https://mars.nasa.gov/resources/26685/mars-sample-retrieval-lander-mars-ascent-vehicle-launch-illustration/ https://mars.nasa.gov/resources/26684/mars-sample-retrieval-lander-concept-illustration/ with UploadWizard |
{kind=link}
{kind=link}
You cannot overwrite this file.
File usage on Commons
The following page uses this file:
File usage on other wikis
The following other wikis use this file:
- Usage on cs.wikipedia.org
{kind=link}