File:TakingASelfieOnMars-3840.webm
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (WebM audio/video file, VP9/Opus, length 2 min 13 s, 3,840 × 2,160 pixels, 19.94 Mbps overall, file size: 315.11 MB)
Captions
Captions
Summary
[edit]| Description |
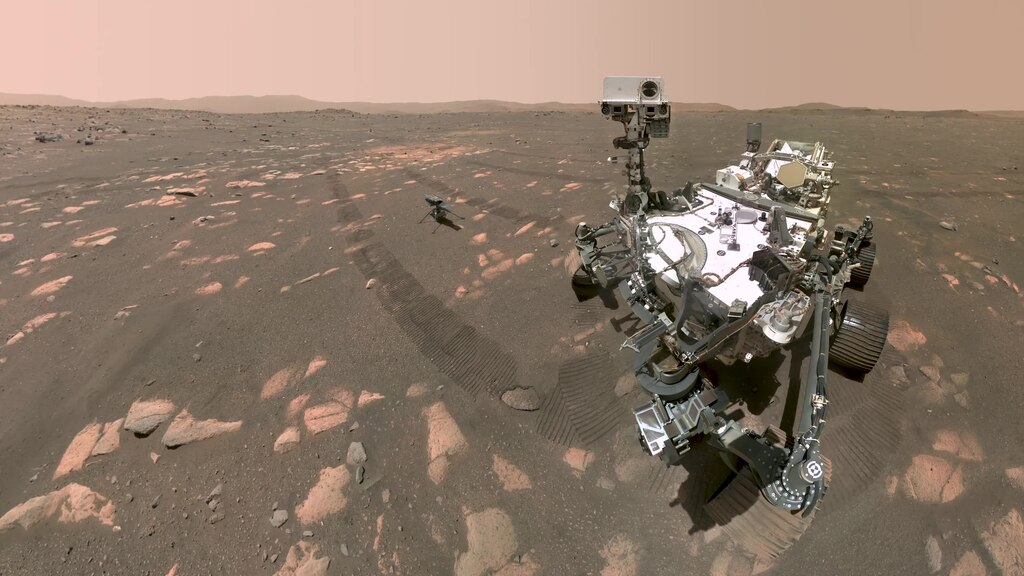
English: June 25, 2021
NASA's Perseverance rover captured a historic group selfie with the Ingenuity Mars Helicopter on April 6, 2021. But how was the selfie taken? Vandi Verma, Perseverance's chief engineer for robotic operations at NASA's Jet Propulsion Laboratory in Southern California breaks down the process in this video. Video taken by Perseverance's navigation cameras shows the rover's robotic arm twisting and maneuvering to take the 62 images that compose the image. The rover's entry, descent, and landing microphone captured the sound of the arm's motors whirring during the process. Selfies allow engineers to check wear and tear on the rover over time. For more information on Perseverance, visit https://mars.nasa.gov/perseverance. TRANSCRIPT The way you and I might take a selfie is by holding the camera out with our arm and taking a single image. The way the rover takes a selfie is a little more complex than that. The way the rover takes a selfie is by using the WATSON camera at the end of the robotic arm. But the WATSON camera was designed to take closeup images of rocks for scientific analysis. And even with the arm fully extended, we can't cover the entire rover in a single image. To capture the entire rover, we take multiple images and then stitch them together. In order to do that, we try to hold the WATSON camera sensor in the same position to take the different images. In order to keep the camera at the same position and take the different image frames, have to move quite a lot. It can take up to an hour of arm motion and imaging to take that entire selfie. The reason you don't see the robotic arm in the selfie is because it's moving between the different image frames that we are taking, and we include enough overlap between the images so that when we stitch them together we don't have to include the arm. Another exciting first on the Perseverance mission is the inclusion of microphones. For the very first time, we were able to record sounds of the arm moving as it was taking the selfie. You can distinctly hear the sounds of the breaks on the arm's actuators clicking open and closed. And at times as the motors are changing speed, it almost sounds musical like a flute. (motors trilling) When a person takes a selfie, we just hold our arm up and take a single image. To create the first Perseverance selfie, it took an entire team of people working together for almost an entire week. In the end, it took 62 images stitched together to create the resulting selfie. Credits NASA/JPL-Caltech/MSSS |
| Date | |
| Source | https://mars.nasa.gov/mars2020/multimedia/videos/?v=485 |
| Author | NASA/JPL-Caltech/MSSS |
Licensing
[edit]| This file is in the public domain in the United States because it was solely created by NASA. NASA copyright policy states that "NASA material is not protected by copyright unless noted". (See Template:PD-USGov, NASA copyright policy page or JPL Image Use Policy.) | ||
 |
Warnings:
|
{kind=link}
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 15:46, 29 December 2021 | 2 min 13 s, 3,840 × 2,160 (315.11 MB) | Chinakpradhan (talk | contribs) | Uploaded a work by NASA/JPL-Caltech/MSSS from https://mars.nasa.gov/mars2020/multimedia/videos/?v=485 with UploadWizard |
You cannot overwrite this file.
File usage on Commons
There are no pages that use this file.