File:First two full-resolution images from the Curosity rover.jpg
Jump to navigation
Jump to search

Size of this preview: 800 × 443 pixels. Other resolutions: 320 × 177 pixels | 640 × 354 pixels | 1,024 × 567 pixels | 1,775 × 983 pixels.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Original file (1,775 × 983 pixels, file size: 976 KB, MIME type: image/jpeg)
Captions
Captions
Add a one-line explanation of what this file represents
Summary[edit]
{kind=link}
| Description |
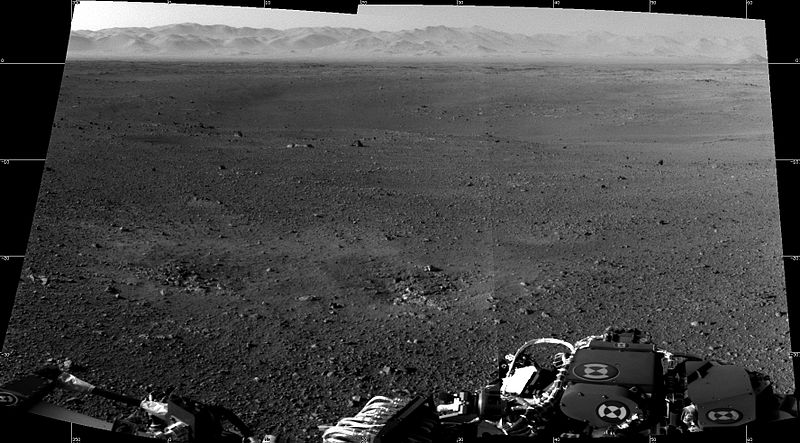
English: These are the first two full-resolution images of the Martian surface from the Navigation cameras on NASA's Curiosity rover, which are located on the rover's "head" or mast. The rim of Gale Crater can be seen in the distance beyond the pebbly ground.
The topography of the rim is very mountainous due to erosion. The ground seen in the middle shows low-relief scarps and plains. The foreground shows two distinct zones of excavation likely carved out by blasts from the rover's descent stage thrusters. These are full-resolution images, 1024 by 1024 pixels in size. |
| Date | |
| Source | http://www.nasa.gov/mission_pages/msl/multimedia/pia16013.html |
| Author | NASA/JPL-Caltech |
| Other versions |
 |
Licensing[edit]
{kind=link}
| This file is in the public domain in the United States because it was solely created by NASA. NASA copyright policy states that "NASA material is not protected by copyright unless noted". (See Template:PD-USGov, NASA copyright policy page or JPL Image Use Policy.) | ||
 |
Warnings:
|
{kind=link}
This image or video was catalogued by Jet Propulsion Laboratory of the United States National Aeronautics and Space Administration (NASA) under Photo ID: PIA16013. This tag does not indicate the copyright status of the attached work. A normal copyright tag is still required. See Commons:Licensing. Other languages:
|
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 23:33, 8 August 2012 | | 1,775 × 983 (976 KB) | Rehman (talk | contribs) |
You cannot overwrite this file.
File usage on Commons
The following page uses this file:
File usage on other wikis
The following other wikis use this file:
- Usage on ca.wikipedia.org
- Usage on en.wikipedia.org
- Usage on et.wikipedia.org
- Usage on fr.wikipedia.org
- Usage on ko.wikipedia.org
- Usage on lt.wikipedia.org
- Usage on ro.wikipedia.org
- Usage on tr.wikipedia.org
{kind=link}